Prácticas con la DualMCU - MicroPython
12. Comunicación entre microcontrolador ESP32 y RP2040
Objetivo
Establecer una comunicación efectiva entre dos microcontroladores de la DualMCU, con el fin de unificar recursos y potenciar el poder de procesamiento en aplicaciones que requieran mayores capacidades.
NOTA En esta práctica, se emplearán ambos microcontroladores para finalizar básicos.
Descripción
Esta práctica proporciona una solución para lograr una comunicación eficiente entre dos microcontroladores, específicamente el ESP32 y el RP2040. La implementación está diseñada para optimizar el rendimiento en aplicaciones que demandan mayores recursos computacionales.
Requisitos
Diagrama de Conexión
A continuación, se muestra el diagrama de conexión, el cual es muy sencillo: solo necesitas conectar la UNIT DUALMCU a tu laptop o computadora de escritorio mediante un cable USB Tipo C.
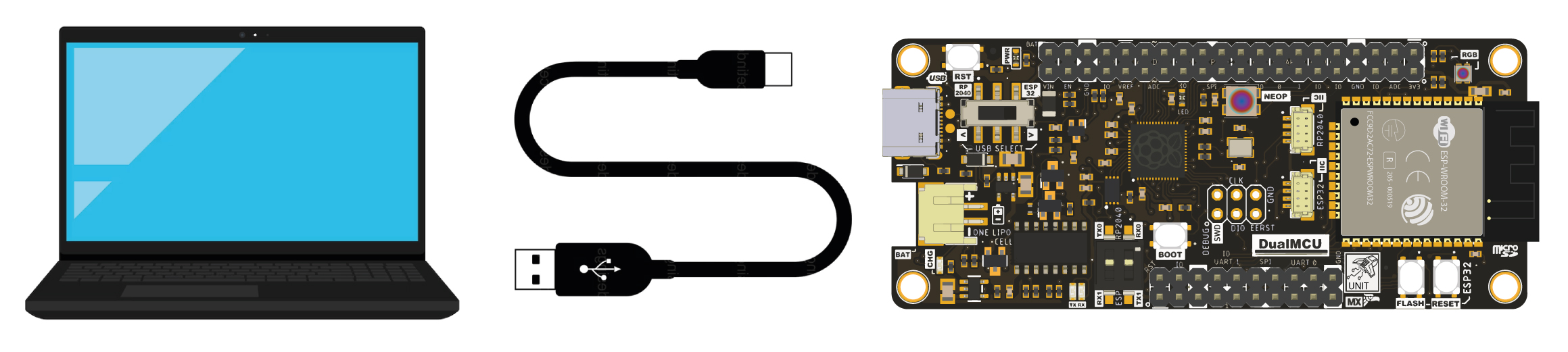
Cambia el Interruptor DIP UART a “ON” para esta configuración.

Para esta práctica, necesitarás cambiar entre microcontroladores. Se te recuerda que a través del selector puedes intercambiar entre microcontroladores. Después de conectar la UNIT DUALMCU al ordenador, procede a encender el dispositivo y seleccionar el microcontrolador (MCU) deseado.
NOTA En esta parte se utilizará el microcontrolador RP2040 por lo que debes cambiar el interruptor a la posición “A”.

Código
El proceso se lleva a cabo en dos partes. La primera etapa implica la carga del código en el RP2040, lo cual debe realizarse de la siguiente manera: selecciona la placa en el COM en la parte inferior derecha.

Copia el siguiente código:
'''
rp2040
'''
import time
from machine import UART, Pin
import ujson
uart1 = UART(0, baudrate=115000, tx=Pin(0, Pin.OUT), rx=Pin(1, Pin.IN))
led_sequence = ["rojo", "verde", "azul"] # Lista que define la secuencia de LEDs
while True:
time.sleep(0.1)
# Obtén el siguiente LED en la secuencia
led_actual = led_sequence.pop(0)
# Añade el estado del LED actual al JSON
datos = {
"led_actual": led_actual,
"accion": "encender"
}
txData = ujson.dumps(datos)
uart1.write(txData + '\n\r')
print(txData)
time.sleep(1) # Espera 1 segundo antes de enviar el siguiente conjunto de datos
# Añade el estado del LED actual al JSON
datos = {
"led_actual": led_actual,
"accion": "apagar"
}
txData = ujson.dumps(datos)
uart1.write(txData + '\n\r')
print(txData)
# Mueve el LED actual al final de la secuencia
led_sequence.append(led_actual)
time.sleep(1) # Espera 1 segundo antes de enviar el siguiente conjunto de datos
Guarda el código en el RP2040, seleccionando Raspberry Pi Pico.

Te aparecerá una ventana en la que deberás escribir el nombre main.py y finalmente presionar ok.

NOTA En esta parte se utilizará el microcontrolador ESP32 por lo que debes cambiar el interruptor a la posición “B”.
'''
ESP32
'''
import ujson
from machine import UART, Pin
uart0 = UART(1, baudrate=115000, tx=Pin(17, Pin.OUT), rx=Pin(16, Pin.IN))
led_rojo = Pin(4, Pin.OUT) # Configura el pin GPIO5 como salida para el LED rojo
led_verde = Pin(26, Pin.OUT) # Configura el pin GPIO18 como salida para el LED verde
led_azul = Pin(25, Pin.OUT) # Configura el pin GPIO19 como salida para el LED azul
def ejecutar_accion(accion, pin_led):
if accion == "encender":
pin_led.on() # Enciende el LED
elif accion == "apagar":
pin_led.off() # Apaga el LED
def recibir_json():
rx_data = b'' # Inicializa una cadena de bytes vacía
while True:
if uart0.any():
byte_received = uart0.read(1) # Lee un byte desde el UART
rx_data += byte_received
# Verifica si el carácter de nueva línea indica el final del JSON
if byte_received == b'\n':
try:
# Intenta cargar el JSON
json_data = ujson.loads(rx_data.decode('utf-8'))
print("JSON recibido:", json_data)
# Extrae los valores de 'accion' y 'led_actual' del JSON
accion = json_data.get('accion', '')
led_actual = json_data.get('led_actual', '')
# Ejecuta la acción indicada en el JSON para cada LED
if led_actual == "rojo":
ejecutar_accion(accion, led_rojo)
elif led_actual == "verde":
ejecutar_accion(accion, led_verde)
elif led_actual == "azul":
ejecutar_accion(accion, led_azul)
print("--led recibido:", led_actual, "accion:", accion)
return json_data
except ValueError as e:
print("Error al parsear JSON:", e)
rx_data = b'' # Reinicia la cadena si hay un error en el JSON
# Ejemplo de uso
while True:
data = recibir_json()
# Realiza acciones con el JSON recibido
Corre el código del ESP32 debe aparecer el los datos enviados por el RP2040.

Resultados
Con unos breves resultados, el control de comunicación por JSON es una práctica que beneficia la comunicación en el aspecto de que los microcontroladores permiten su uso sin componentes de software externos, por lo que su implementación es práctica. Los resultados de esta comunicación permiten conocer las posibilidades de la DUALMCU.

Conclusiones
En conclusión, el objetivo de la práctica es lograr una comunicación efectiva entre dos microcontroladores de la DualMCU, el ESP32 y el RP2040, con el propósito de consolidar recursos y potenciar el poder de procesamiento. La implementación busca ofrecer una solución que optimice el rendimiento en aplicaciones que requieren mayores capacidades computacionales, brindando así una solución eficiente para proyectos que demandan un mayor nivel de procesamiento y coordinación entre microcontroladores.
DualMCU ESP32+RP2040
Para obtener más información, consulte las páginas del producto en
- https://uelectronics.com/
- Hardware-DualMCU
- Product Reference Manual.pdf
- C++ & Micropython Examples files for the UNIT DualMCU.
- Licencia El código que se presenta en este repositorio está licenciado bajo la Licencia Pública General de GNU (GPL) versión 3.0.
⌨️ con ❤️ por UNIT-Electronics 😊